1. 边缘检测#
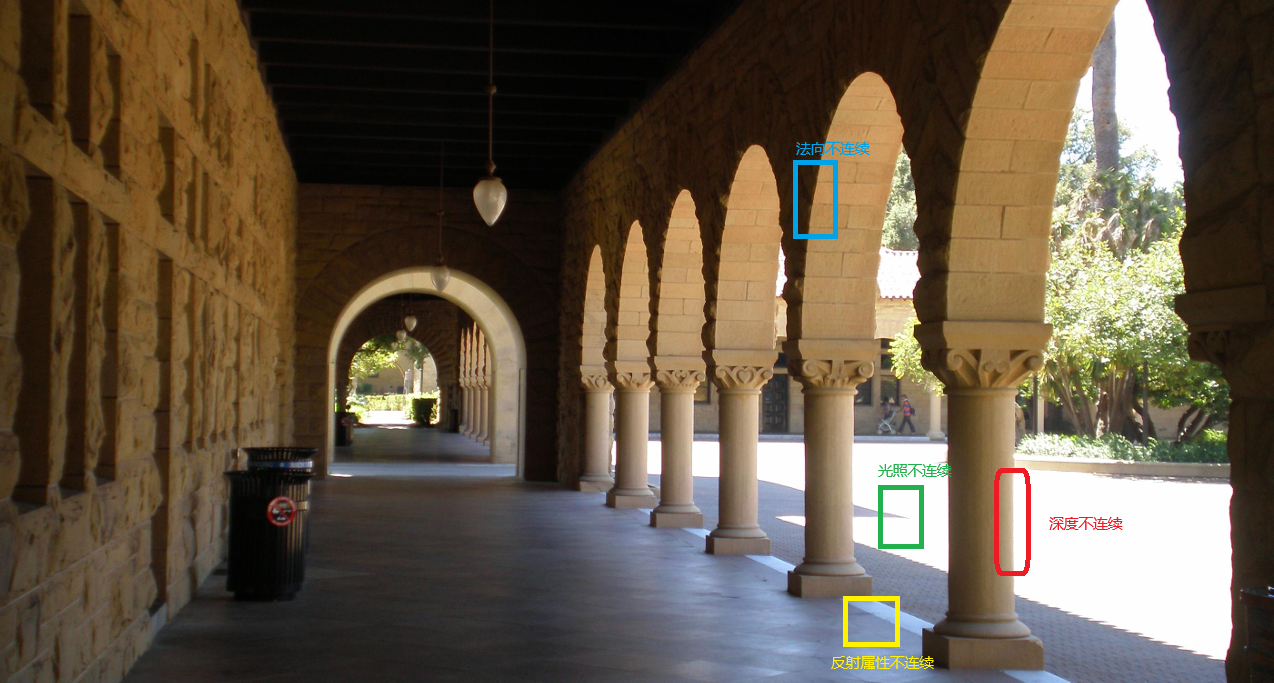
1.1 形成边缘的原因#
- 照明不连续
- 深度不连续
- 反射属性(材质)不连续
- 法向不连续
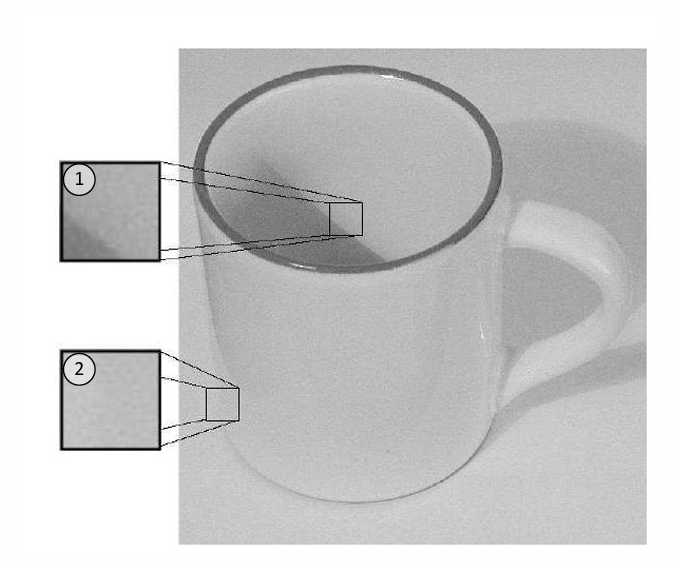
但是图片中的边缘有时也不能很好地反映事物的外形。比如因为光照不连续产生的边缘①其实并非杯子本身的形状。
也有的边缘会因为物理世界的复杂性而丢失,比如②分不清杯子和桌板。
1.2 边缘检测与差分算子#
1.2.1 边缘模型#
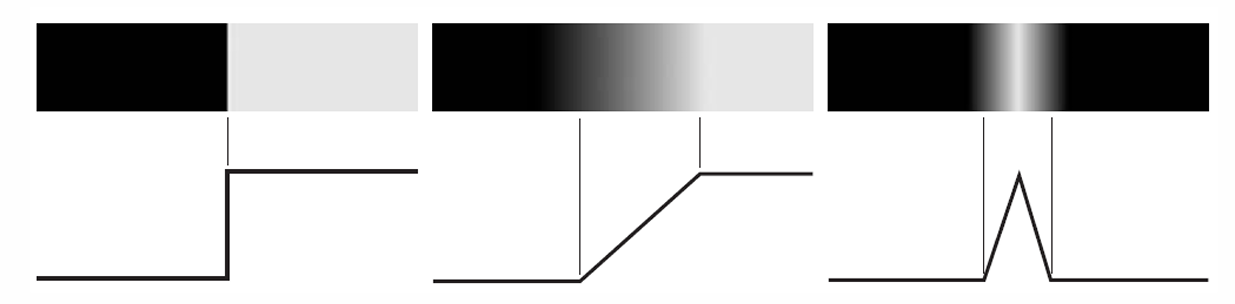
理想的边缘有3种:
- 阶跃边缘(Step Edge)
- 斜坡边缘(Ramp Edge)
- 屋脊边缘(Ridge Edge)
1.2.2 差分算子#
边缘就是一张图像中两边亮度值相差(变化)非常大的区域,可以把检测边缘和求一幅图像的导函数(变化率)联系起来。把一阶导函数取到极大值或者极小值(负数,非零)的点作为边缘,对应在二阶导数的零点。
而离散图像的导函数即差分。把差分图像作为导数图像。
一般有3种差分方式:
1.前向差分:Δf(x)=f(x+1)−f(x)2.后向差分:Δf(x)=f(x)−f(x−1)3.中心差分:Δf(x)=21(f(x+1)−f(x−1))据说是中心差分性能好于其他差分方式。
由于卷积运算可以表示f(x)邻域内的线性运算,因此这三种差分方式可以用卷积核来完成:
| 差分方式 | 公式 | kernel |
|---|
| 前向差分 | Δf(x)=f(x+1)−f(x) | [1,−1,0] |
| 后向差分 | Δf(x)=f(x)−f(x−1) | [0,1,−1] |
| 中心差分 | Δf(x)=21(f(x+1)−f(x−1)) | 21[1,0,−1] |
| 二阶中心差分 | f′′(x)=f(x+1)−2f(x)+f(x−1) | [1,−2,1]:Laplacian卷积核 |
由于图像的噪声也对应了图像上变化很大的部分,因此一般在使用差分算子前会对图像做一次平滑。比如高斯平滑,均值平滑。
如果拉普拉斯卷积核前使用了高斯核平滑,则合在一起就成为高斯拉普拉斯卷积核LoG(Laplace of Gauss)。
1.3 一阶差分算子检测图像边缘#
1.3.1 边缘检测一般步骤#
对于一维情形,差分算子形如[1,0,−1],需要在之前进行一次平滑,如果采用均值平滑[1,1,1]T,则得到Prewitt卷积算子:
Prewittx=[1,1,1]T×[1,0,−1]=1,0,−11,0,−11,0,−1另一种得到这个算子的角度是: 做水平方向的差分时,平均上下两行会让结果更加准确一些。
而这只是得到了水平方向的梯度Gx,竖直方向的梯度Gy可以通过竖直的卷积算子(水平算子的转置)得到。
Prewitty=1,0,−1,1,0,−1,10−1得到梯度G=[GxGy]。
梯度模长∣G∣和方向d:
∣G∣=Gx2+Gy2或者∣Gx∣+∣Gy∣d=arctan(GxGy)所以检测边缘的一般步骤是:
0.对原图进行平滑滤波降噪1.用kernelx求水平梯度Gx和用kernely求竖直梯度Gy2.求平方和的根或者是近似得到梯度幅度M,得到梯度幅度图像G′3.二值化梯度幅度图像G′,threshold=M1.3.2 常用的一阶微分算子#
常用的一阶差分算子有Prewitt,Sobel算子。
| 算子 | kernelx |
|---|
| 3*3Prewittx | 1,0,−11,0,−11,0,−1 |
| 3*3Sobelx | 1,0,−12,0,−21,0,−1 |
| 5*5Sobelx | 1,2,0,−2,−12,3,0,−3,−23,5,0,−5,−32,3,0,−3,−21,2,0,−2,−1 |
注意: 这些卷积核已经自带了一部分的平滑效果。
当卷积核的大小变大以后,平滑滤波的效果变强,但是对于边缘的定位精确性会减弱。
1.4 二阶差分算子检测图像边缘#
二阶方向导数∂l2∂2f:
∂l2∂2f=∂lfl′=∂lfx′cosθ+fy′sinθ=fxx′′cos2θ+fxy′′cosθsinθ+fyx′′sinθcosθ+fyy′′sin2θ在Laplace算子里就近似为:
∣∂l2∂2f∣max≈fxx′′+fyy′′∣∣∇2f∣≈[f(x+1,y)−2∗f(x,y)+f(x−1,y)]+[f(x,y+1)−2∗f(x,y)+f(x,y−1)]由于f(x,y)邻域内的线性运算都可以转化为卷积运算,因此有Laplace卷积核:
Laplace=0,1,0,1,−4,1,010Laplace算子是旋转对称的,因此具有旋转不变性(90°)。
因为边缘对应的是一阶导数的极大值点,也就是二阶导数的零点。需要把Laplace算子卷积得到的结果找出过0点的位置。

Laplace算子卷积得到的结果已经是幅度值!
1.5 Canny边缘检测#
Canny检测的准则是:
- 检漏率低、正确率高
- 检测到的相应尽量在真实边缘的中心位置
- 对单一边缘的响应只有一个边缘点
Canny边缘检测的核心思想是:
- 非极大值抑制(找到中心位置,单一相应点)
- 延迟阈值(防止错检、漏检)
1.5.0 得到梯度图像G#
和一般一阶差分检测边缘的方法一样,Canny方法也先用某个核(比如Sobel)得到一张梯度图G。既有梯度模长也有梯度方向。接着进行非极大值抑制和延迟阈值。
1.5.1 非极大值抑制#
在梯度图G上对每一点(x,y)沿着梯度方向d的邻域进行搜索,并且抑制掉那些比(x,y)小的点。只留下某一区域内的极大值点。

一定程度上可以保证检测到的点会是单一边缘的单一响应。并且大概率在中心位置。
1.5.2 延迟阈值#
二值化时的threshold很难确定,如果太大会导致漏检,如果太小则会导致错检(边缘精确性不高)。
图像上的边缘分布大概率是有空间局部性特征的。所以Canny采用延迟阈值+边缘连接的手段来解决这个问题。
设定两个大小不一样的Hi,Lo,Hi>Lo,用Hi得到强边缘图,而用Lo得到弱边缘图。

强边缘几乎已经可以确定是真实地边缘,而弱边缘却还需要观察。
1.5.3 边缘连接#
边缘点和边缘点分布在一起的可能性比较大。
因此,如果一个弱边缘点周边有强边缘点,那它大概率是边缘点。但如果它周边一个强边缘点都没有,那它大概率不是边缘点。
按照如上规则删去或者保留弱边缘点,得到最后检测地结果。

1.6 边缘检测的尺度#
由于平滑操作对于细节来说有模糊的作用,图像越平滑细节也会越少。这会导致图像中的某些细小边缘会逐渐消失。
可以对图像施以一系列σ不同的高斯滤波用来提取不同尺度的边缘特征。

1.7 边缘检测和模式匹配: 轮廓匹配#
物体A的轮廓(边缘信息),可以用来在一张图像G上识别物体A。
提取G的边缘图G′。


